Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
![]()
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Настройка тока A4988
Перед использованием драйвера нам нужно сделать небольшую настройку. Нам нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.
На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Для настройки тока шагового двигателя есть два метода:
Способ 1:
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
ограничение тока = Vref x 2,5
Например, если ваш двигатель рассчитан на 350mA, вы должны установить опорное напряжение 0,14В.
![]()
Способ 2:
В данном случае мы собираемся установить ограничение тока, измеряя ток, протекающий через катушку двигателя.
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP. Не оставляйте вход STEP висящим в воздухе, подключите его к источнику питания логики (5 В)
- Подключите амперметр последовательно с одной из катушек шагового двигателя и измерьте фактический ток.
- Возьмите небольшую отвертку и отрегулируйте потенциометр ограничения тока, пока не установите номинальный ток шагового двигателя.
![]()
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
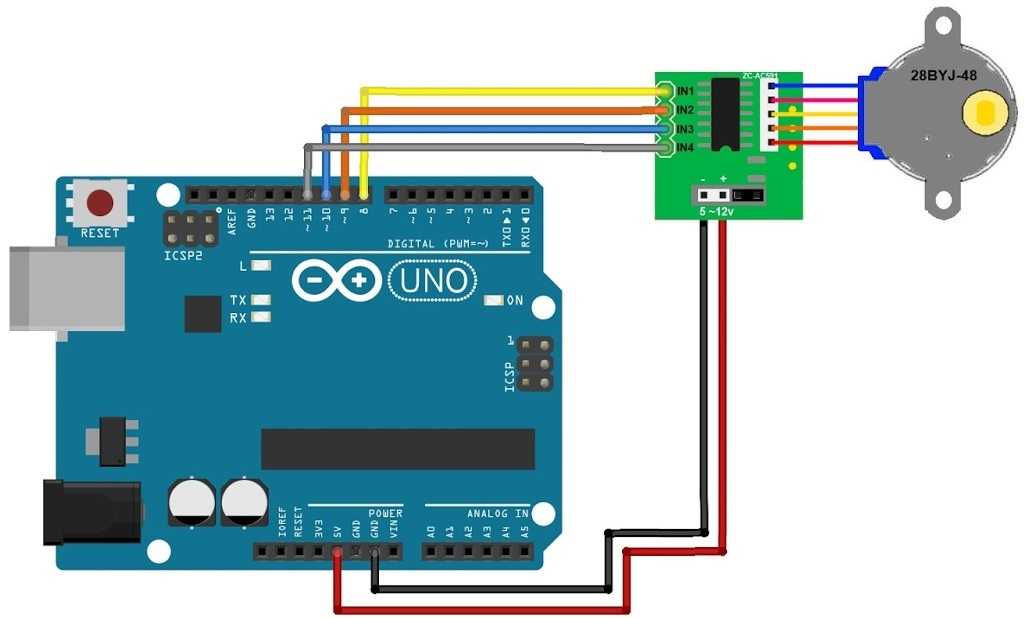
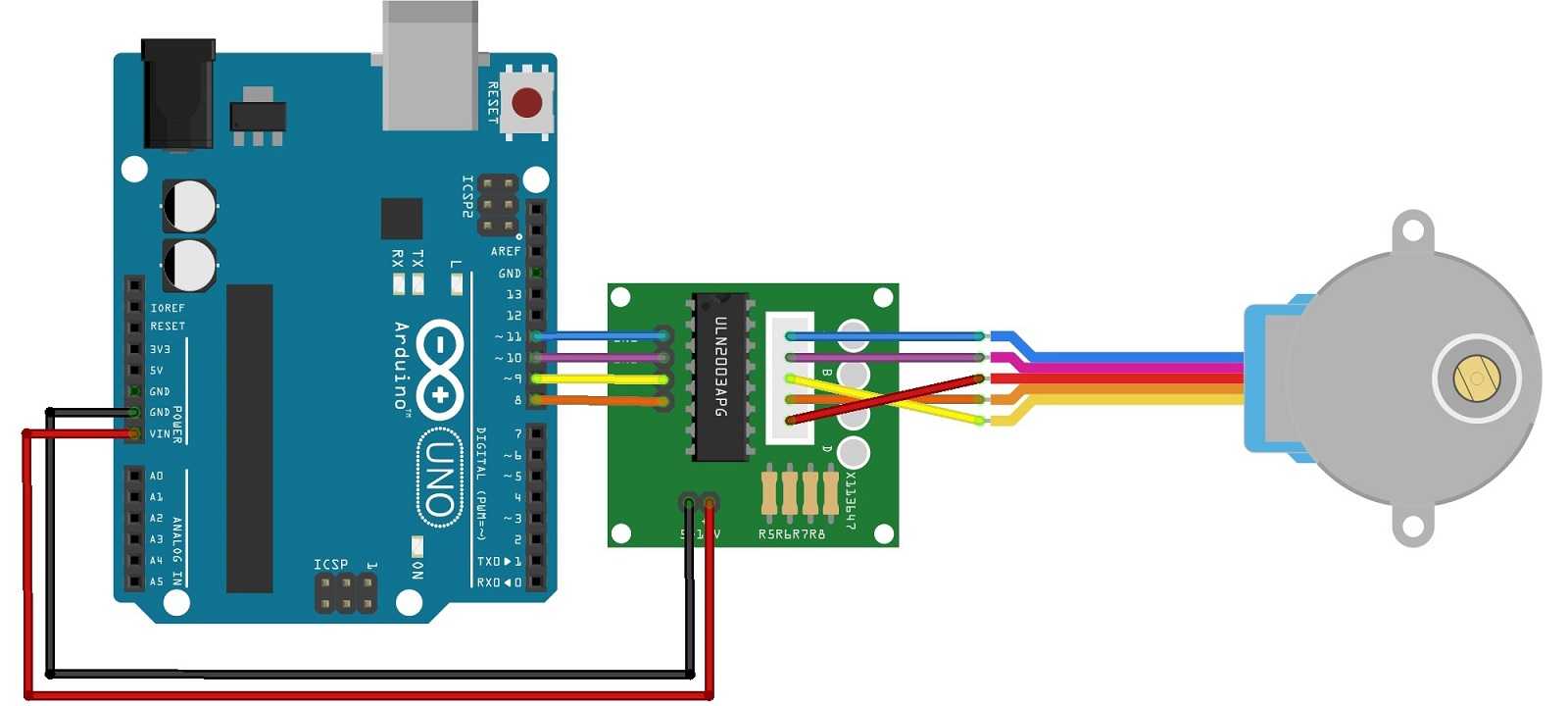
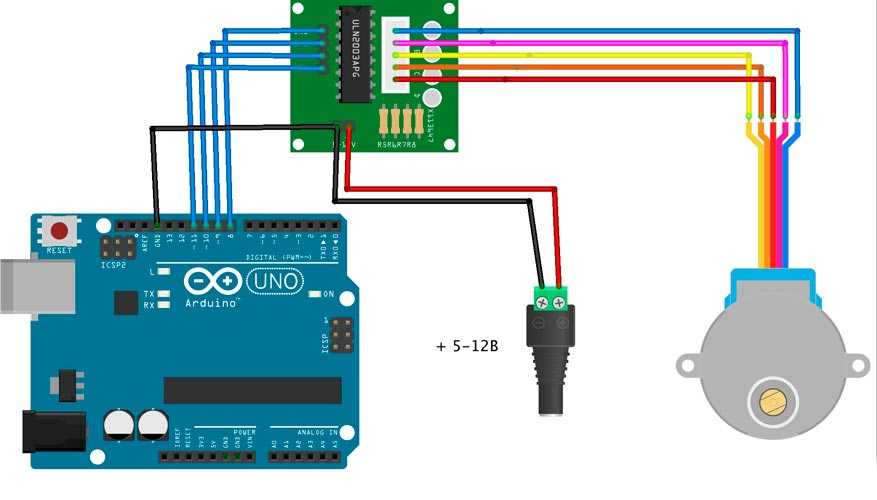
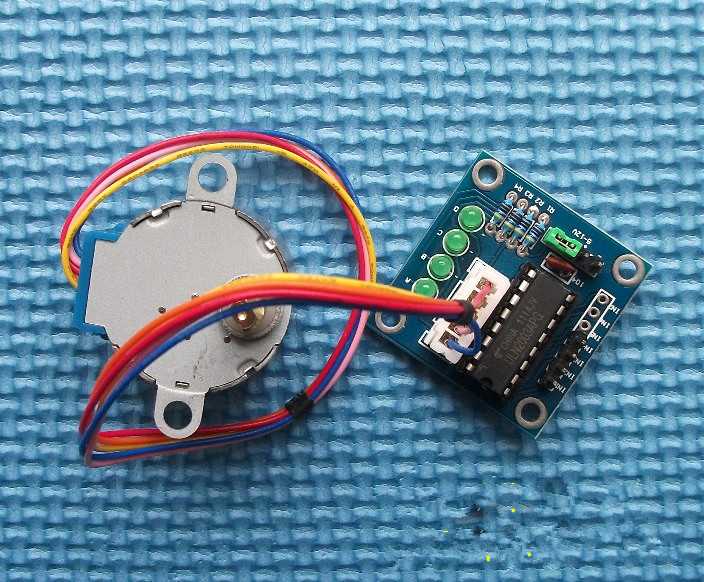
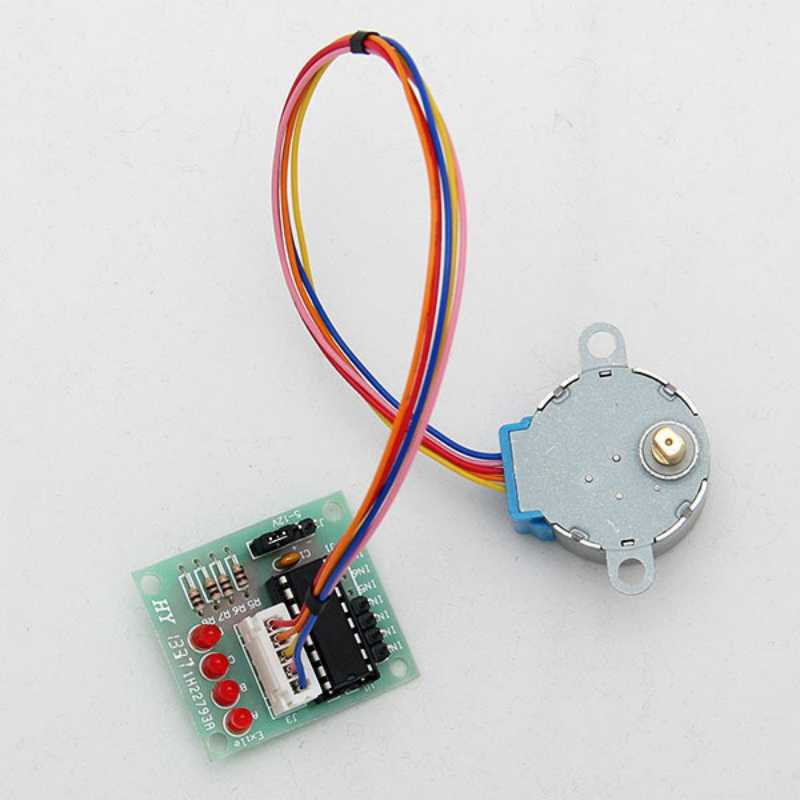
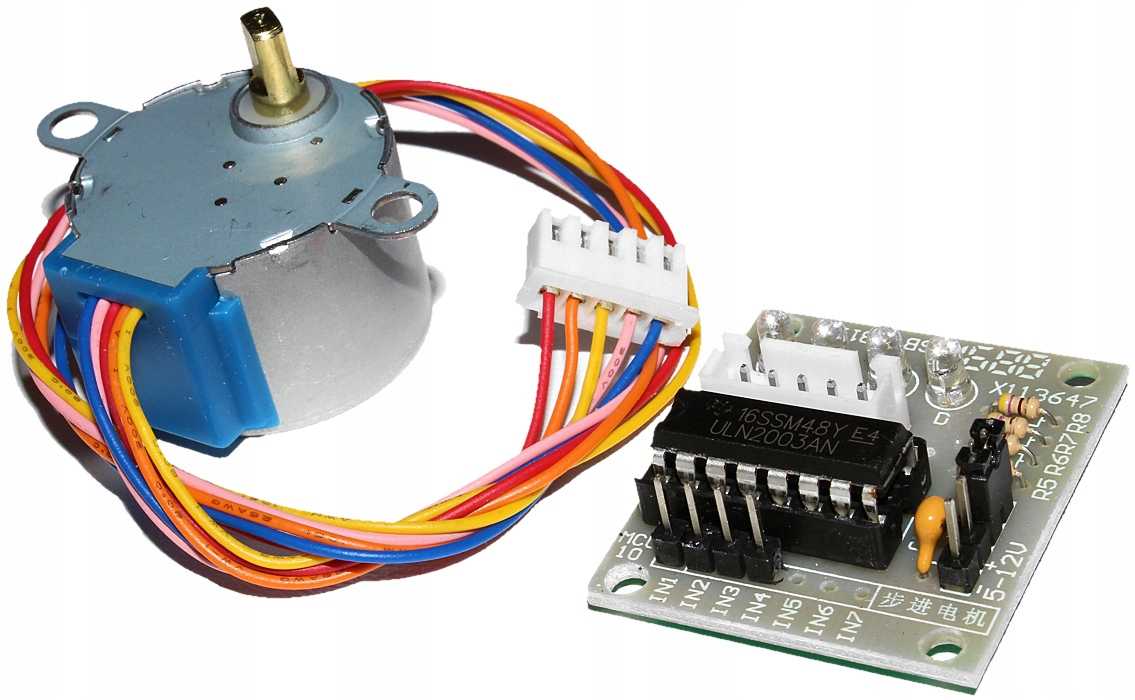
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Конструкция и управление шаговым двигателем
![]()
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45 градусов. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60 градусов друг от друга.





Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6 градуса на шаг. Чтобы повернуть двигатель на угол, скажем, 216 градусов, а затем снова остановиться в требуемом положении, потребуется всего: 216 градусов / (3,6 градуса / шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
![]()
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
![]()
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Управление несколькими шаговыми двигателями Nema 17 одновременно или NemaStepper
Я думаю что вы, если работали с arduino+nema 17, знаете, что запустить несколько двигателей одновременно бывает очень затруднительно.
Есть разные способы решения этой проблемы, самый простой, пожалуй — использование библиотеки NemaStepper. Библиотека упрощает данную задачу во много раз, главное преимущество — она не останавливает выполнение программы. Устанавливается она также, как и все остальные библиотеки. Распространяется по MIT лицензии.
Ну что, давайте приступим. И начнем мы с подключения.
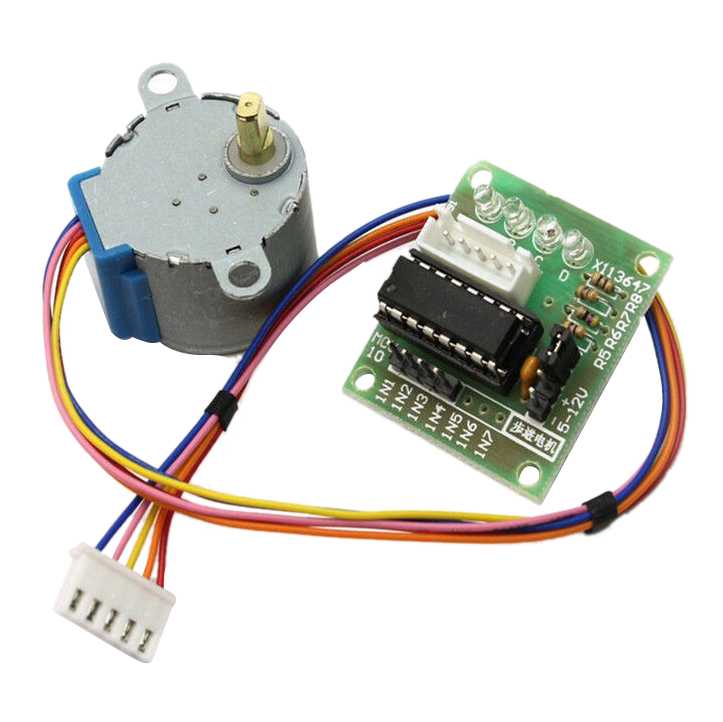
Мы будем использовать Simple Nema 17 с алиэкспресса за 500 рублей, драйвер L298N и arduino uno. Вот они:
- В примере я буду показывать четыре подключенных драйвера к ардуине, хотя буду использовать только один.
- В интернете есть много туториалов по подключению Nema 17, поэтому я не буду подробно расписывать это здесь.
Библиотека является объектно — ориентированной. Давайте рассмотрим пример включения одного мотора:
О всех методах библиотеки можно узнать из файлов исходного кода библиотеки (в шапке библиотеки есть описание).
*Подробнее о коде в примере.
А теперь переходим к примеру.
В библиотеке есть встроенный пример (на данный момент он там один), который позволяет управлять сразу тремя моторами с Serial.
Данный пример принимает на порт команды, указанные ниже.
Давайте его разберем.
Начнем с шапки — подключения библиотек:
Далее объявляются три мотора, со следующими параметрами:
1. Первый пин 2. Второй пин 3. Третий пин 4. Четвертый пин 5. Количество шагов за оборот — у большинства моторов Nema 17 это 200. 6. Стартовая скорость 7. Значение указывающее, нужно ли удерживать вал после остановки (при true драйверы превращаются в барбекю)
Далее инициализация порта:
Затем, ВАЖНО! В главном цикле нужно обновлять положение двигателей командой Step()
Далее следует подпрограмма, которая получает данные с порта, включает/выключает моторы, задает скорость, тормоза, вращение.
И так, давайте попробуем загрузить ее в плату.
Тогда заходим в монитор порта и вводим команды из кода. Каждая команда заканчивается символом /. Первые три символа — название команды. То, что между названием и / — параметры. Давайте включим моторы командой «EMS/» (Enable MotorS). Затем укажем мотору 1 скорость 60 командой «SS160/» (Set Speed), где 60 — скорость. И наконец, включим первый мотор командой «MV1100/», (MoVe) где 100 — количество оборотов. Все работает. Ура.







Тоже самое с остальными моторами.
Ну и где взять библиотеку.
Спасибо за прочтение, надеюсь вам помогла моя статья.
Когда я искал решение моей проблемы, единственной подходящей библиотекой оказалась она.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
![]() С переменным магнитным сопротивлением
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
![]() С постоянным магнитом
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
![]() Униполярный ШД
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
![]() Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
![]() Биполярный шаговый двигатель
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Типы и конструктивные особенности
Сегодня применяется несколько видов ШД, отличающихся по конструкции, типу обмоток, особенностям управления и иным параметрам. Рассмотрим каждую классификацию более подробно.
![]()
По конструкции ротора
Многие характеристики двигателя, касающиеся скорости вращения и режима работы, зависят от ротора.
С этой позиции выделяется три вида устройства.
Реактивный (синхронный). Особенность — отсутствие роторного магнита. Конструктивно изготавливается из специальных сплавов, позволяющих снизить индуктивные потери. Устройство имеет вид шестеренки с зубцами, а на полюсах статора подается напряжение со второй пары. Как результат, создается магнитная сила для перемещения ротора. По принципу действия реактивный шаговый агрегат имеет много общего с синхронным мотором, где поля ротора и статора вращаются в одном направлении. ![]()
- Двигатель с магнитами. В отличие от прошлого устройства подвижный элемент комплектуется постоянным магнитом с двумя и более полюсами. Ротор крутится, благодаря притягиванию и отталкиванию полюсов с помощью электрического поля в момент подачи разницы потенциалов на определенные обмотки.
- Смешанные. В гибридных устройствах совмещаются лучшие качества магнитных и реактивных моторов. В отличие от прошлых моделей угол и шаг здесь меньше. Конструктивно ротор оборудован постоянным магнитом, имеющим цилиндрическую форму. Внешне он имеет вид двух полюсов с круглым сечением, на поверхности которых находятся роторные зубцы. Такая особенность гарантирует хороший момент вращения и удерживания. Главные плюсы — максимальная плавность, точность и скорость перемещения.
По типу обмоток
Плавность функционирования шагового двигателя находится в прямой зависимости от числа обмоток, поэтому на этот фактор важно обращать особое внимание
![]()
Многие ошибочно считают, что количество обмоток зависит от числа фаз. Это не так, ведь даже 2-фазный мотор может иметь четыре и более обмотки.
Шаговые двигатели бывают:
- Униполярными. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов.
- Биполярный. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.
По типу управления
Для расширения функционала и удобства применения предусмотрена система управления.
Она бывает следующих типов.
Волновая: возбуждение только одной обмотки. Недостатком является минимально доступный момент.
![]()
Полношаговая: одновременное включение обмоток.
![]()
Полушаговая: делание геометрии шагового мотора пополам. Обеспечивается увеличенное разрешение при позиционировании вала агрегата.
![]()
По типу
При выборе шаговых двигателей нужно понимать, что они бывают нескольких типов.
Кратко рассмотрим их особенности:
- Биполярные двигатели — двухфазные с угловым перемещением в 0,9 или 1,8 градуса. Разработчики гарантируют высокую точность шага без нагрузки величиной до 5%.
- С энкодером (часто называются гибридными серводвигателями). Особенность состоит в наличии инкрементального энкодера. Моторы объединяют лучшие качества серво- и шаговых электрических моторов, а цена таких устройств меньше в сравнении с сервосистемой. Применяются в комплексе с контроллером.
- Линейные (актуаторы). Принцип действия построен на преобразовании вращательного движения в линейное. Иными словами, в них сочетается винтовая передача и ШД, объединенные в общем блоке.
- Шаговые двигатели с редуктором. Применяются в ситуации, когда необходимо получить максимальное усилие на валу электрического привода с минимальной скоростью вращения. В роли редуктора используется планетарный тип, оборудованный прямозубыми шестеренками с небольшим люфтом передачи.
На рынке представлен большой выбор устройств, имеющих индивидуальные характеристики и подходящих для определенных сфер деятельности. Эти моменты необходимо учитывать при выборе модели.






![]()
Чем отличается синхронный двигатель от асинхронного для чайников кратко, простыми словами, сравнение по конструкции и принципу действия
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя — электронное устройство, которое заставляет шаговый двигатель «шагать» по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение — драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Исходный код программы (скетча)
Arduino
#include <Stepper.h>
#define STEPS 200
// Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver
Stepper stepper(STEPS, 2, 3); // Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver
#define motorInterfaceType 1
int Pval = 0;
int potVal = 0;
void setup() {
// Set the maximum speed in steps per second:
stepper.setSpeed(1000);
}
void loop() {
potVal = map(analogRead(A0),0,1024,0,500);
if (potVal>Pval)
stepper.step(10);
if (potVal<Pval)
stepper.step(-10);
Pval = potVal;
}
|
1 |
#include <Stepper.h> Stepperstepper(STEPS,2,3);// Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver #define motorInterfaceType 1 intPval=; intpotVal=; voidsetup(){ // Set the maximum speed in steps per second: stepper.setSpeed(1000); } voidloop(){ potVal=map(analogRead(A0),,1024,,500); if(potVal>Pval) stepper.step(10); if(potVal<Pval) stepper.step(-10); Pval=potVal; } |



